Three IMUs to estimate relative foot distances during gait
IEEE TNSRE
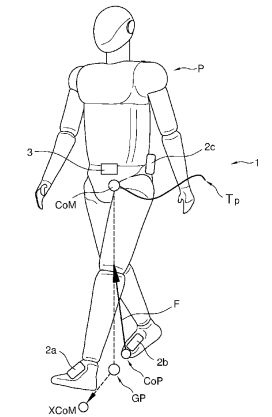
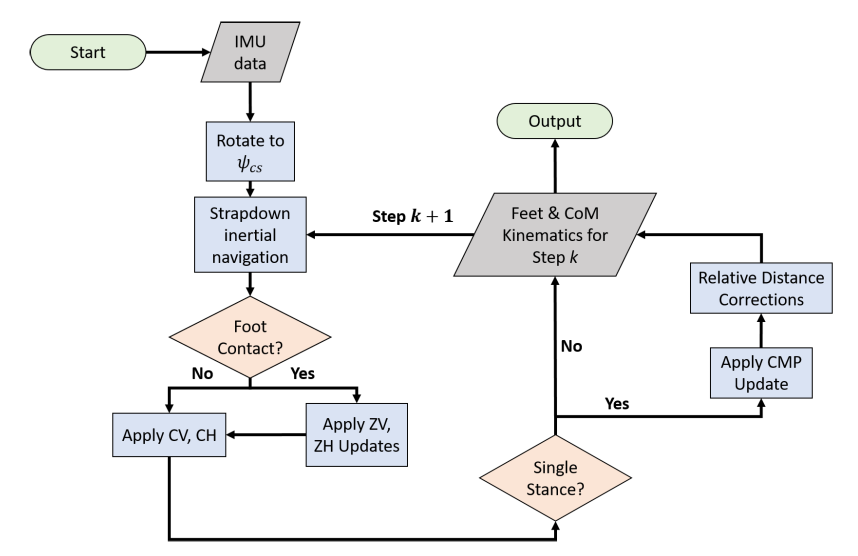
Inertial measurement units (IMU) placed on each foot, and on the pelvis are useful in tracking these segments over time, but cannot track the relative distances between these segments. In this study, we track the relative distances using the assumptions of the Centroidal Moment Pivot (CMP) theory. An Extended Kalman filter approach was used to fuse information from different sources: strapdown inertial navigation, commonly used constraints such as zero velocity updates, and relative segment distances from the CMP assumption; to eventually track relative feet and CoM positions.